
The world of Advanced Driver-Assistance Systems (ADAS) is evolving rapidly, with radar, lidar, and camera systems playing a central role in how vehicles perceive and react to their environments. As automotive engineers and EV innovators push toward higher levels of autonomy, understanding the nuances of these sensors and how they integrate into vehicle platforms is essential.
At Munro & Associates, we deliver detailed breakdowns from our teardown experts. They analyze every system — from sensor fusion to real-world performance.
Understanding the Levels of Autonomy
The Society of Automotive Engineers (SAE) defines autonomy from Level 0 (no automation) to Level 5 (full automation). The most common production vehicles today operate at Level 2, where the system can manage steering and braking simultaneously but requires constant driver supervision. Level 3 allows for hands-off, eyes-off conditions in certain scenarios, while Level 4 vehicles, like Waymo’s robotaxis, can operate without a human driver in specific geofenced areas. Level 5, meanwhile, is still an aspirational goal—implying universal autonomy under any condition.
Radar and Camera: The Core of ADAS
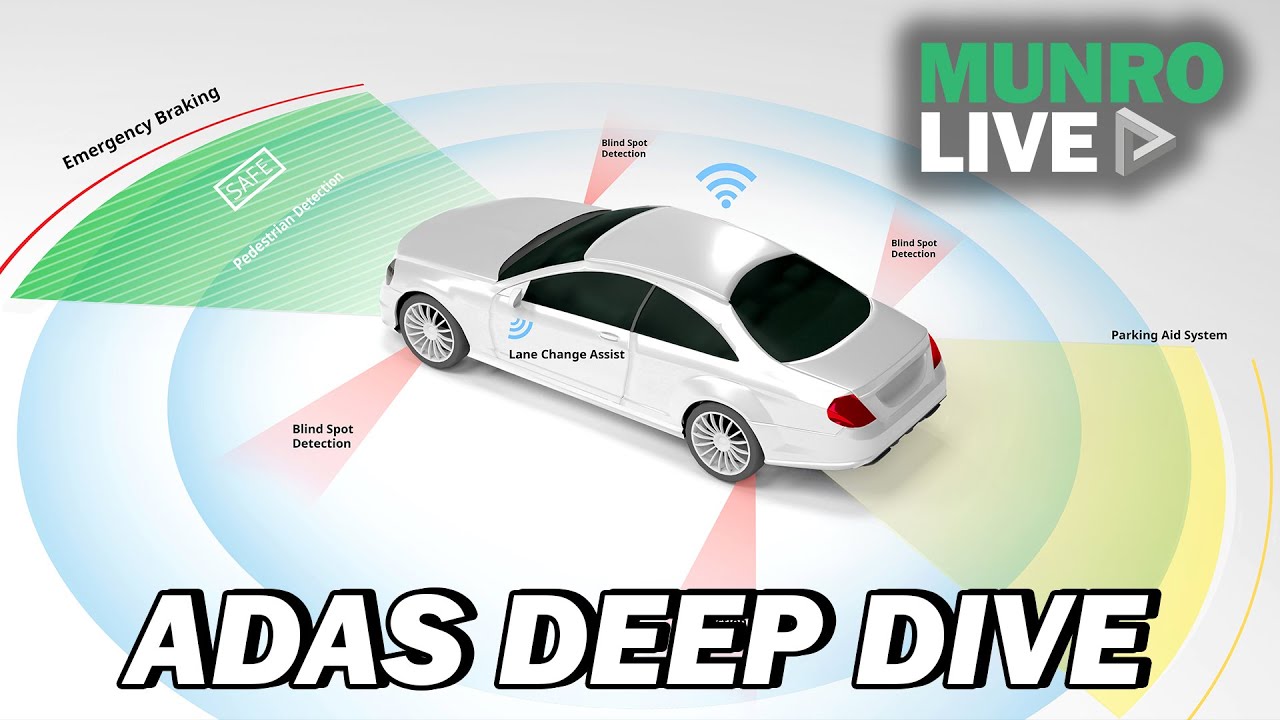
At the heart of most ADAS platforms are forward-facing radar and camera systems. These two sensors are the workhorses of modern autonomous and semi-autonomous vehicles.
- Radar uses electromagnetic waves to detect objects and measure their speed and distance. It’s largely immune to weather and lighting conditions but lacks object classification.
- Cameras, on the other hand, deliver rich visual data that allows systems to recognize lane markings, traffic signs, vehicles, cyclists, and pedestrians.
The real magic happens through sensor fusion, where these inputs are combined to make more reliable driving decisions. For instance, radar might detect an object that a sun-blinded camera misses, or a camera may identify a harmless Coke can that radar flags as a threat.
The Rise of Centralized Processing
As OEMs strive to reach Level 3 autonomy, centralized processing units (ADAS ECUs) are becoming more common. These high-performance modules integrate inputs from multiple sensors—including radar, lidar, cameras, and ultrasonics—and handle decision-making. This architecture allows for more efficient sensor placement, better data processing, and scalable hardware that supports future OTA updates.
However, this shift brings cost and cooling challenges. Passive cooling may suffice for Level 2 systems, but Level 3 setups sometimes require active or even liquid cooling due to the intense processing demands.
Smart vs. Dumb Sensors
A recurring theme in ADAS design is the trade-off between “smart” and “dumb” sensors:
- Smart sensors perform signal processing at the source (e.g., inside the camera).
- Dumb sensors merely transmit raw data to a centralized unit.
Many OEMs are trending toward dumb sensors paired with powerful ECUs. This approach reduces wiring costs and enables broader feature integration, although it increases the computational burden on the ECU.
Supporting Sensors: Ultrasonics, Corner Radar, and Telematics
Beyond the core camera-radar duo, vehicles include:
- Ultrasonic sensors: Used for low-speed tasks like parking assist. These are cheap and short-range but must be color-matched and resistant to UV and corrosion, adding to production complexity.
- Corner radars: Enable blind-spot monitoring, cross-traffic alerts, and automatic lane changes. These are critical for Level 2+ functionality.
- Telematics modules (TCUs): Facilitate OTA updates and upload driving data to OEMs, helping improve safety by analyzing fringe cases such as inclement weather or sudden stops.
The Cost and Insurance Trade-Off
Sensor placement has major cost implications. Fascia-mounted radars, for example, are cheaper for OEMs but increase insurance costs due to the higher likelihood of damage in minor collisions. Conversely, body-mounted sensors cost more upfront but offer better durability and lower long-term repair costs.
Even a minor fender-bender in an ADAS-equipped car can rack up thousands in repairs due to delicate sensor calibration and replacement protocols.
Lidar and the Push to Level 4
Lidar technology adds another layer of perception by offering high-resolution 3D mapping. Although expensive and sensitive to weather interference, lidar combines the strengths of radar (distance measurement) and cameras (object recognition). It’s often used in Level 4 and experimental Level 5 vehicles like those from Waymo and Cruise.
Waymo, in particular, employs a sensor suite that includes:
- Over 20 cameras
- Multiple lidars (roof-mounted and corner-based)
- Standard radar
- External microphones to detect emergency vehicles
This “all-of-the-above” strategy offers redundancy, ensuring that if one system fails or is compromised by environmental conditions, others can compensate.
Tesla’s Vision-Only Strategy
Tesla stands out by excluding radar and lidar entirely from newer vehicles, relying exclusively on camera data for its Full Self-Driving (FSD) Beta. While this reduces cost and complexity, it places a heavier burden on AI-driven interpretation and may struggle under adverse weather conditions.
Tesla mitigates these challenges with real-time driver monitoring (eye-tracking cameras), OTA updates, and community-sourced data to improve the FSD software iteratively.
BlueCruise and Collaborative Control
Ford’s BlueCruise represents a “Level 2 Plus” approach—providing hands-free driving under strict conditions but still needs constant driver monitoring. Ford’s strategy focuses on human-like driving behavior and collaboration between the system and driver. Features like in-lane biasing, adaptive cruise control, and assisted lane changes offer a smoother experience.
Ford’s ADAS lead, Sammy Omari, emphasizes continual improvement through real-world feedback. BlueCruise-equipped vehicles collect and upload behavioral data, enabling rapid iteration of software features and safety metrics.
ADAS and the Future of Public Transit
Robotaxi companies like May Mobility take ADAS further by integrating hybrid-electric platforms with sensor-rich autonomous stacks—often built from cost-conscious components like 905nm lidars and off-the-shelf cameras. These AVs prioritize accessibility (e.g., wheelchair ramps) and are designed with modular, vehicle-agnostic systems that can be adapted to different use cases.
One noteworthy innovation is their interior-mounted compute system, which avoids the need for weatherproofing and allows easier cooling and maintenance.
ADAS Sensor Camera Systems: Key Takeaways
- Sensor fusion is key: No single sensor is perfect. Combining multiple types creates robust perception.
- Cost vs. performance is a constant trade-off: From sensor placement to compute design, engineering choices must balance reliability, scalability, and expense.
- Software defines success: Regardless of hardware, the “secret sauce” is in how data is interpreted and acted upon.
- Driver responsibility remains: Even in advanced systems, human supervision is critical—especially at Level 2 and 3.
Stay at the Forefront of Innovation
Explore more expert teardowns, engineering deep-dives, and sensor strategy breakdowns at Munro & Associates and subscribe to Munro Live for full video coverage. Whether you’re designing the next-generation EV or investing in automotive tech, understanding how these systems work—from chip to chassis—is essential.